ARCTIC Human Demonstration Data Processing¶
Process raw ARCTIC data¶
If you want to add a new object/demonstration clip in order to make a new task environment, you would need to process more data from ARCTIC.
First, follow the installation instructions from the ARCTIC repo (preferablly in a separate conda environment). To download raw ARCTIC data, use their bash scripts: ./bash/download_misc.sh and ./bash/download_body_models.sh
Note
The ARCTIC dataset demonstrations are labeled either use_01, use_02,... or grab_01, grab_02, .... Current dexmachina codebase assumes only using the use_01, use_02 clips, e.g. a clip box-0-600-s01-u01 is from arctic repo’s downloaded downloads/data/raw_seqs/s01/box_use_01.mano.npy raw file. You would need to make bigger changes in order to incoporate the grab_ series data.
The raw data you downloaded from ARCTIC will contain only the essential data, which needs to be further processed to generate per-step object and MANO hand meshes (we need this for contact estimatation). To process the raw data, go to the arctic repo and install their contact environment. Run the below script once for every demonstration clip. For example, to process this clip collected by subject 01, run:
conda activate arctic
python scripts_data/process_seqs.py --mano_p downloads/data/raw_seqs/s01/laptop_use_01.mano.npy --export_verts
which will generate a full sequence at ./outputs/processed_verts/seqs/s01/laptop_use_01.npy. ARCTIC has a nice built-in viewer that can load the demonstration and visualize them locally, the command looks something like:
python scripts_data/visualizer.py --no_image --seq_p ./outputs/processed_verts/seqs/s01/laptop_use_01.npy --mano --object
Contact Approximation¶
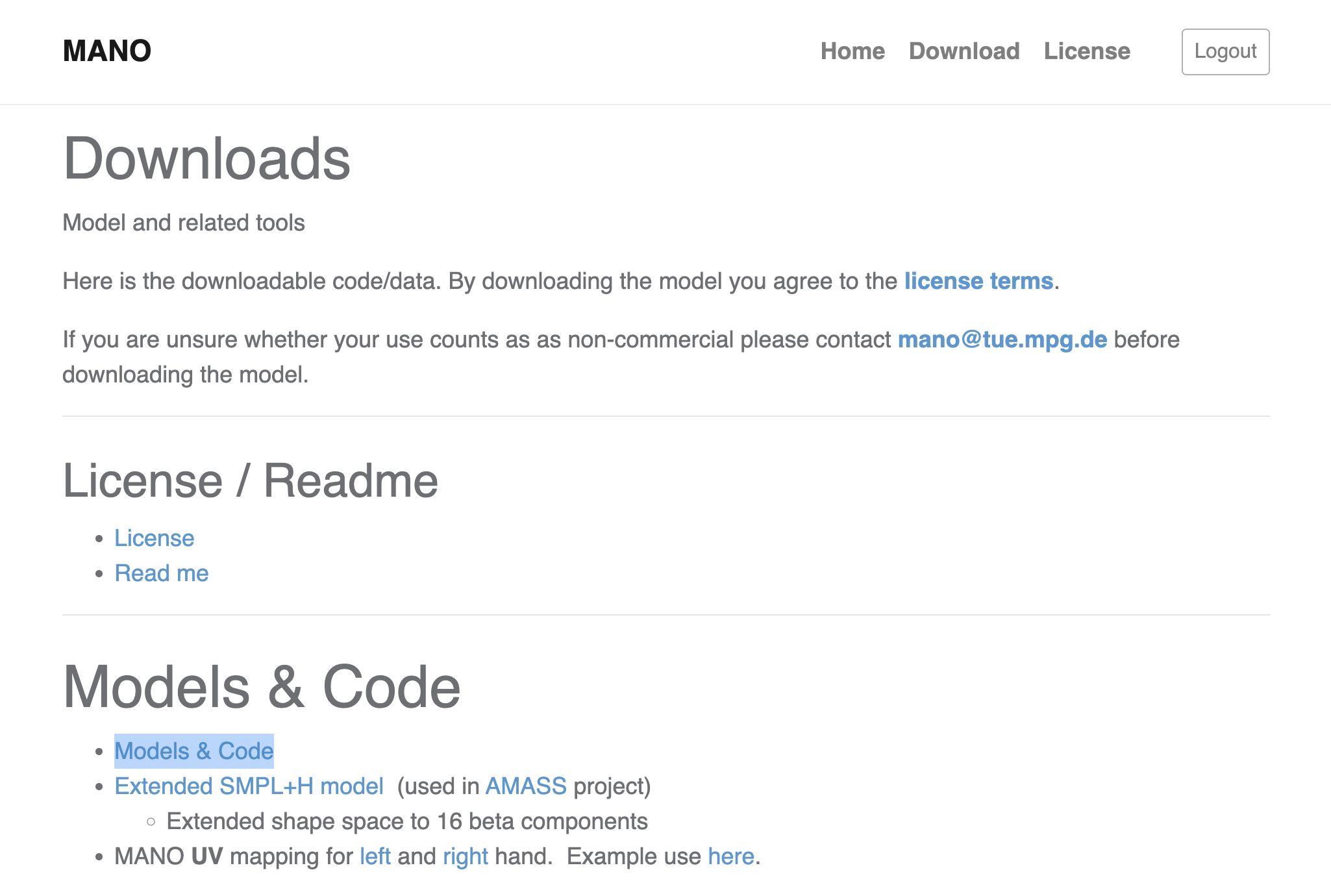
You would need to first register account and download the official MANO models from their website: https://mano.is.tue.mpg.de/download.php. Click the “Models & Code” (highlighted in the screenshot below) to download the .zip file. The unzipped folder should contain mano_v1_2/models/xxx, which we need for the process_arctic.py script below.
Next, come back to this dexmachina repo and run process_arctic.py to further process the output demonstration sequences.
conda activate dexmachina
cd ../dexmachina/dexmachina
FNAME=${HOME}/arctic/outputs/processed_verts/seqs/s01/laptop_use_01.npy
MANO_MODEL_DIR=${HOME} # say the mano_v1_2 folder is in your /home directory
python retargeting/process_arctic.py -p $FNAME -mmd $MANO_MODEL_DIR --farthest_sample --save
This will default save to the asset folder in dexmachina/dexmachina/assets. Add the --save_dir flag to modify the save path.
Note
If you get this error from chumpy: ImportError: cannot import name 'bool' from 'numpy' (/home/mandi/miniconda3/envs/dexmachina/lib/python3.10/site-packages/numpy/__init__.py), re-install chumpy: pip install git+https://github.com/mattloper/chumpy
The above steps only need to be run once for each human demonstration clips, in the next section we run kinematic-retargeting to process the data for different dexterous hands.
Convex Decomposition on Collision Mesh¶
We use V-HACD for collision shape decomposition. The articulated object URDFs are pre-processed and in dexmachina/dexmachina/assets/arctic.